The project of a multi-purpose semi-autonomous dry cargo ship code-named SAC (Semi-Autonomous Coaster) is designed to transport general cargo, grain, dangerous goods and ISO containers:
- TEU (20’) – 106 pcs,
- FEU (40’) – 48 pcs.
In addition, 12 places for refrigerated containers are provided on board.
SAC is a safe vessel, capable of autonomous navigation in open waters, ensuring optimal operation of the unit.
The unit will be equipped with an ICT system that will allow for:
- Remote monitoring and control of the ship's engine room and navigation system,
- High level of unit safety and energy optimization,
- Reduction of the necessary number of crew members,
- Remote takeover of control over the unit under certain conditions.
1. Purpose and project assumptions
The purpose of the project was to develop and build, and at a later stage to test in real conditions, a multi-purpose semi-autonomous unit equipped with innovative design solutions:
- Semi-autonomous marine navigation technology for automatic and fuel-optimized route planning, including anti-collision manoeuvres.
- An ecological system of a ship's power plant with a battery system that will reduce fuel consumption compared to the diesel-electric drives used and will enable the use of the stored energy in standstill situations.
- Optimized main dimensions of the ship dictated by the analysis of market requirements (optimization of the amount of transported goods, energy demand),
- payload, tank capacity and tank location to improve a wide spectrum of maintenance and operational challenges.
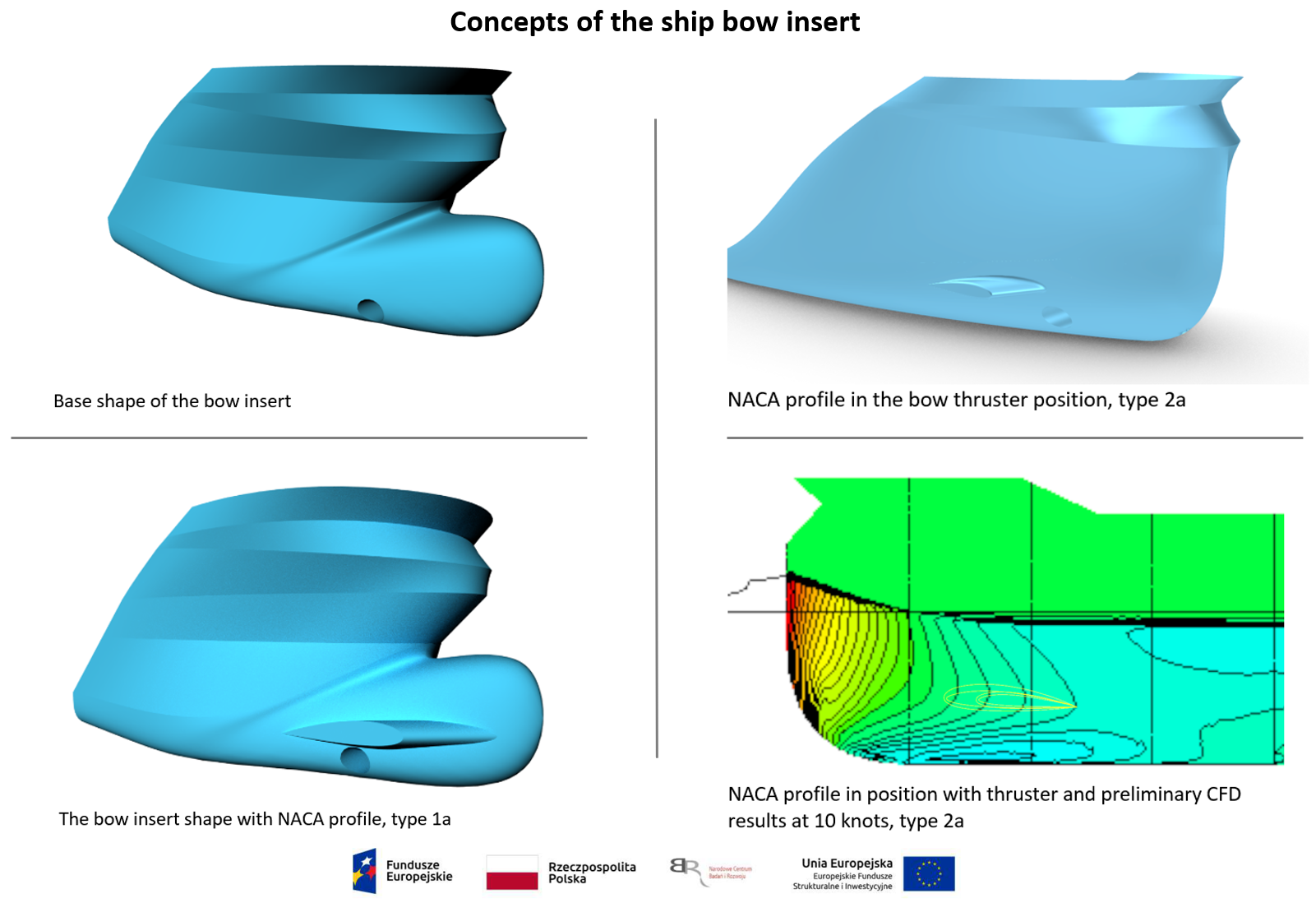
- Optimized hull shape with the option of a bow insert significantly reducing the resistance of the unit,
- Ship bridge built to facilitate the installation of additional advanced ship monitoring equipment to control the full range of ship parameters,
- the hold is divided by two movable partitions in order to adapt the unit to the transport of various goods,
- The optional design of the lowered wheelhouse ensures safe navigation and the ability to enter ports with limited permissible height.
1.1. Main semi-autonomous ship systems:
- Sea navigation - will allow for automatic guidance of the ship in all open waters, including solving collision situations with the established CPA (Closest Point of Approach), subject to COLREGS regulations and taking into account the basin's bathymetry. The system will adapt to changing assumptions.
The autopilot software will perform semi-autonomous functions, both from the local and remote ICT systems.
- Ecological power plant of the ship with a battery system - a diesel-electric engine with an additional innovative power system (eco Engine Room mode) will significantly reduce fuel consumption. The battery system installed on the ship will accumulate the energy saved in the engine room.
The parameters of the engine room will be monitored and analyzed in order to enable automatic settings (both local and remote) and optimization of operating costs.
2. Research project stages
The research project was divided into the following stages:
Stage I
- Initial design of vessel prepared by Nelton company.
Stage II
- A technical and classification project developed in close cooperation with the Consortium Members and the Classification Society.
Stage III
- Model tests performed by CTO S.A. in Gdansk. At this stage, a physical scale model of the ship was made to study the vessel's parameters and design the propulsion and steering system.
Stage IV
- Introduction of an optimization solution based on the results obtained in the previous stages.
As part of the research work, a preliminary design of the unit, a technical and classification design were developed, and model tests were carried out.
3. Conclusions from the conducted research
3.1. Stage I
The initial design of the vessel included:
- Development of the shape of the hull and three concepts of the shape of the bow along with preliminary hydrostatic calculations,
- Resistance calculations using approximate methods guaranteeing the correct selection of ship's propulsion devices,
- Development of the concept of the general arrangement plan, power plant plan of the unit with the drive system, tank plan, energy balance for each of the three variants of the solution.
- Conducting a preliminary analysis of the ship's damage stability.
- Preliminary design of three ship bow concepts.
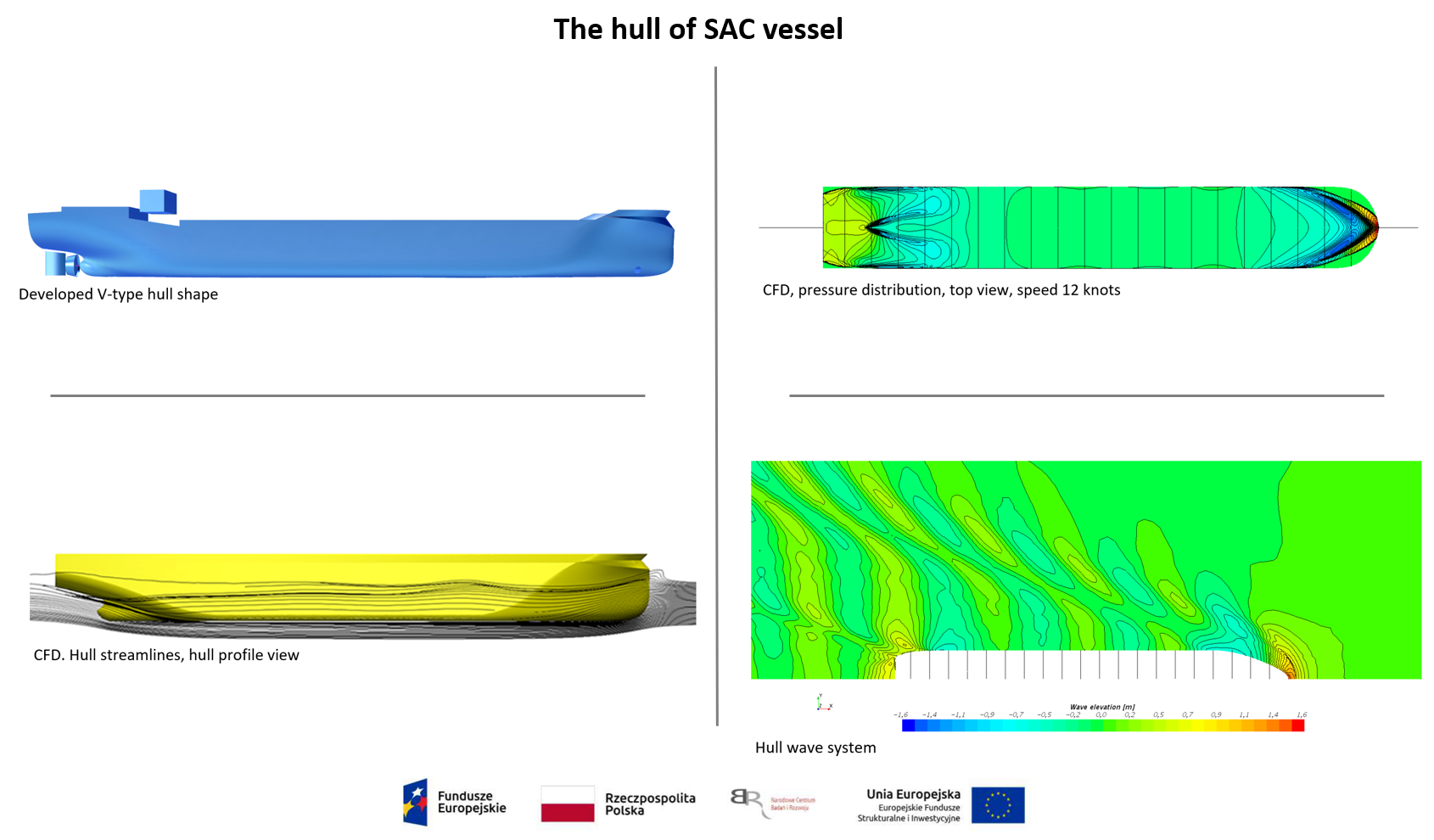
- Analysis of the pressure distribution on the hull. Calculations using the CFD method for typical drafts and service speeds, calculation models taking into account the adopted concepts of the shape of the bow.
All planned tests were carried out in the initial design of the unit.
Main particulars of the designed vessel:
LOA - Length overall = 88,45 [m]
LBP - Length between perpendiculars = 84,95 [m]
B - Beam moulded = 12,90 [m]
H - Depth moulded = 7,00 [m]
Tscl - Draught Scantling = 5,30 [m]
PB - Main Engine Output (Brake Power) = 1.600 [kW]
The hull shape was developed using a parametric approach. The theoretical lines of the hull were determined by the evolutionary method supported by evolutionary principles in determining the optima of functions describing the shape. From the examined population of shapes, the one that best met the set parameters was selected.
At this stage, a preliminary analysis of the ship's unsinkability and an analysis of the pressure distribution on the hull were also prepared. CFD calculations were made for typical drafts and assumed service speeds.
The initial energy balance of the unit was prepared for the shape of the hull with a classic bow insert.
For the shape of the hull with a classic bow insert, preliminary hydrostatic calculations and resistance calculations using approximate methods were carried out. These calculations are to allow for the correct selection of drive devices for the designed unit.
The developed shape of the hull ensures very good nautical properties and its optimization resulted in lower energy demand of the unit, which allowed to reduce the size of the propeller.
When developing the concept of the bow insert, the operational profile of similar vessels in the assumed area of operation was adopted. It shows that over 80% of all vessels sail in the speed range of 9-11 knots with an average deadweight of 2,800 DWT.
The completed general plan and other design documentation define the spatial division of the unit: accommodation zone for the crew, working spaces and warehouses. Separate drawings show the plan of the engine room and propulsion system of the unit, division of tanks, cargo space, plan of on-board equipment.
It has been planned to prepare a solution for a lowerable superstructure, which is important in determining the area of operation of this type of vessel - it would allow for safe and efficient navigation of the vessel without depriving the vessel of the ability to sail in places with a limited permissible height.
At this stage, the project could not take into account the semi-autonomous features of the ship and the requirements for dedicated equipment (e.g. metering and controls in the engine room, monitoring and ICT, collision detection and others).
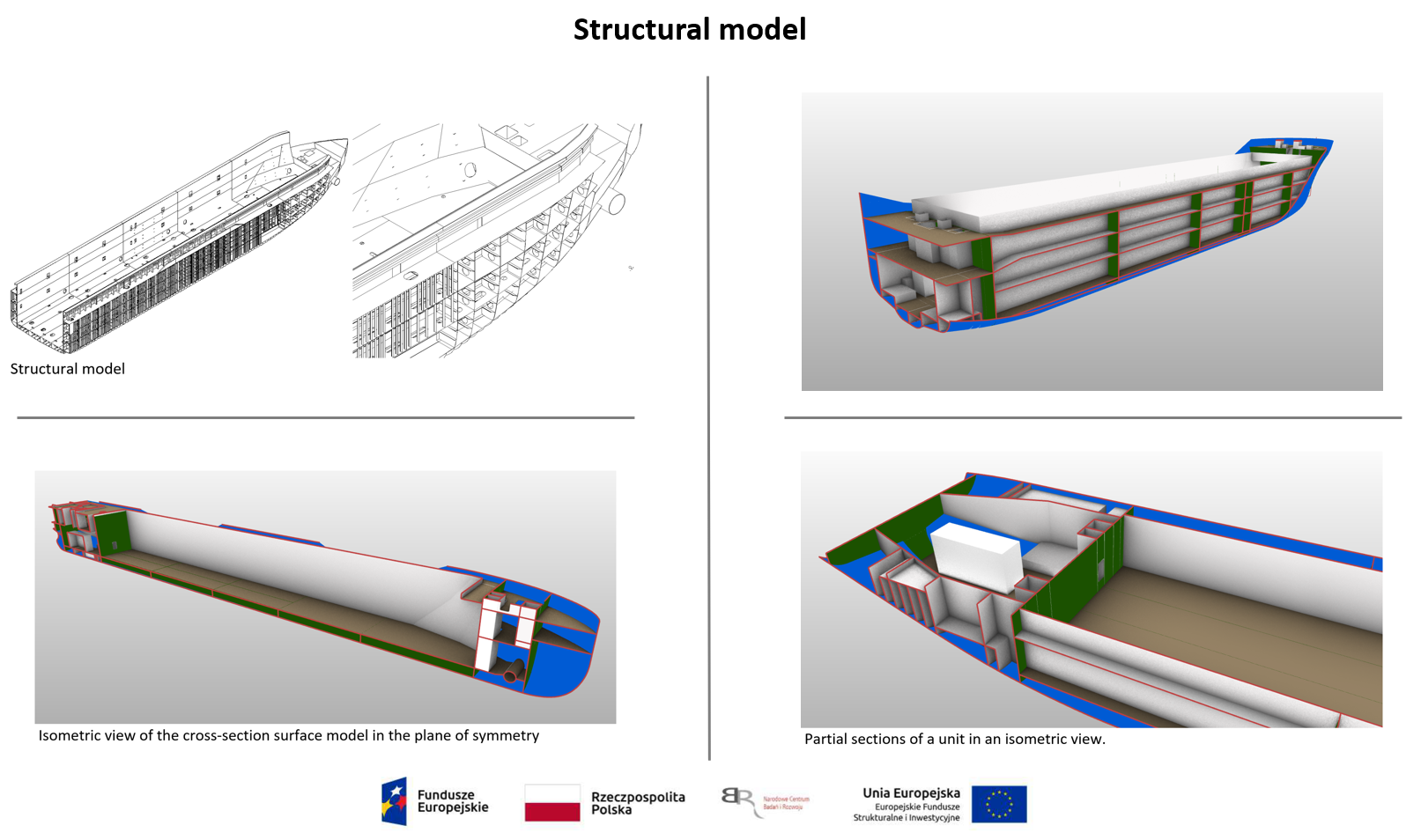
3.2. Stage II
Technical and classification project in the scope of:
- Design of the transverse and longitudinal sections,
- Deck structures, bulkheads, platforms, external plating and main foundations scantlings
- Optimization of the structure using the FEM method based on a simplified calculation model.
- Development of diagrams of: ship system pipelines showing the general idea of the installation and the mechanisms and devices used, general vessel air conditioning system.
- Construction of a structural and equipment 3D model with an analysis of the distribution of the ship's component masses and their centers of gravity.
- Plans: insulation of windows, doors and hatches, stairs and ladders, deck equipment, layout and securing of containers
- Development of a list of mass components and their centers of gravity.
- Plan of main electrical installations.
3.2.1. Summary of stage II
To perform the design tasks at this stage, the design assumptions from the initial stage of the project as well as international regulations and conventions constituting the requirements that must be met by this type of ships were adopted. In order to carry out a preliminary analysis of the distribution of the ship's component masses, the construction of a computer three-dimensional structural and equipment model was started.
Plans for insulation, windows, doors and hatches, stairways and ladders and pre-selected deck equipment have been developed. A plan of the main electrical installations was created on the basis of a preliminary energy balance prepared earlier.
Piping diagrams of ship systems have been designed. They present the general idea of the installation and allow for the initial selection of mechanisms and devices, including air conditioning and ventilation.
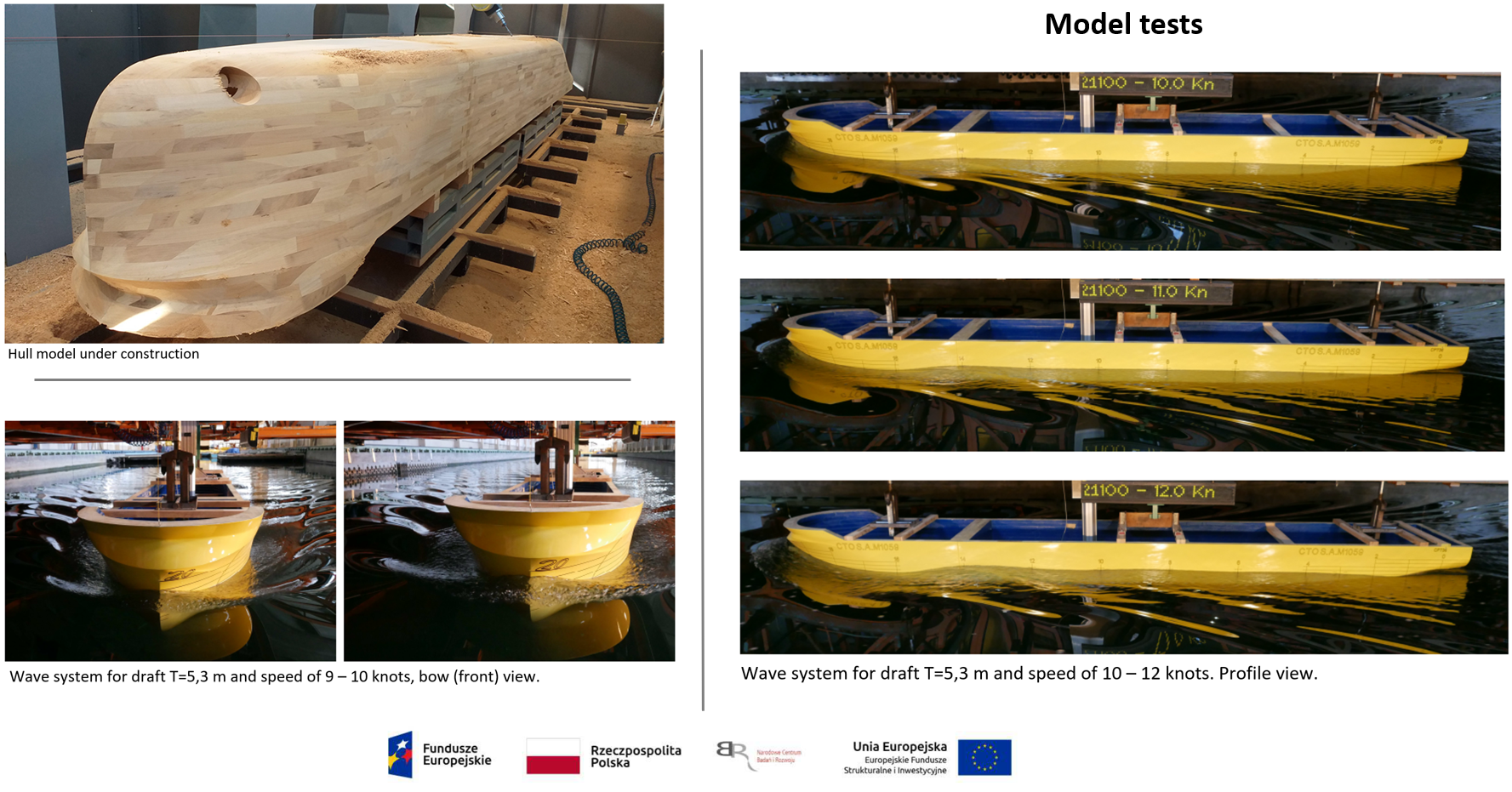
3.3. Stage III
Model tests carried out by CTO S.A. research institute in Gdansk. At this stage tests of calm water tank on a model of Semi-Autonomous Coaster were conducted .
The purposes of the tests were as follows:
- determination of resistance and self-propulsion characteristics for two load conditions;
- determination of nominal 3D wake field in the propeller disc;
- determination of optimal trim.
3.3.1. Summary of stage III
Model tests at the Ship Technology Center in Gdańsk were carried out on a model with a classic bow insert in the scale of 1:13 on a basin with dimensions of 270 x 12 x 6 m.
The rudder model provided by Becker Marine System was used for the tests. The variable-pitch propeller model was coordinated with the propeller supplier - CAT Propulsion from Sweden.
The aim of the model tests was to predict the resistance-propulsion properties, and then to optimize the shape based on the obtained results and to design the propulsion and steering systems of the unit.
The test report shows that the obtained results are consistent with or better than estimated.
It is worth emphasizing that the shape of the vessel's hull developed during the research stage ensures very good nautical properties.
The optimization of the shape and the resulting lower energy demand made it possible to use a smaller propeller, which has a positive effect on the economic aspect of the project.
Despite the use of a smaller propeller, the efficiency of the entire propulsion system is similar to that initially estimated for the larger propeller.
Thanks to the model tests carried out, we obtained the effect of optimizing the shape of the hull in the skeg area, which additionally improves the wake stream field.
3.4. Stage IV
The aim of this stage was to introduce optimization solutions based on the results obtained in stages I-III, using:
- Iterative, CFD-assisted optimization of the hull shape for three bow concepts along with shape fairing,
- Analysis of mass components and its distribution in relation to the obtained hydrostatic buoyancy forces generated by the shape of the bow.
- Analysis of service speeds and behavior on calm water and waves with the use of selected bow shape solutions.
The next stage of modeling tests was to concern seaworthiness tests, rocking damping tests, analysis of bow inserts and preparation for maneuvering tests in open water.
The research stage was to end with the optimization of the shape of the hull based on the solutions and tests obtained in the previous tasks.
Due to the suspension of design works, this stage has not been started.


Development, construction and verification in real conditions of a prototype of a semi-autonomous cargo ship for sea navigation
Nelton Design in a consortium with Szczecin Shipyard and JPP Marine, and in cooperation with the Maritime University of Szczecin and the Ship Technology Center in Gdańsk, carried out a research and development project of the first vessel in the world equipped with semi-autonomous systems at the 4th level of autonomy according to the Lloyds Register of Shipping scale (level 2. according to BV).
The project was co-financed under the Intelligent Development Operational Program by the National Center for Research and Development, POIR.01.01-00-0478/18.
Introduction, purpose and project assumptions
Conclusions
For independent reasons, work on the project was discontinued and the final stage of research work, model tests, concerning nautical and hydrodynamic tests with additional bow inserts and optimization of solutions based on the results of research from previous stages, was not carried out. Despite the interruption of research and development works, the proposed design of a multi-purpose semi-autonomous dry cargo ship met the initial assumptions.
Optimization of the shape and the related reduced energy demand of the unit fits very well into the necessary ecological activities. The main economic assumptions related to the specific fuel consumption in relation to the transported load and the possibility of entering inland ports with a limited permissible height have been met. We are convinced that the implementation of IT and ICT technologies will additionally improve the ship's safety and navigation capabilities. In connection with the current economic trend and independent research on the autonomy of vessels, we hope that the presented research will be continued in the field of semi-autonomy of the vessel, its impact on maritime transport and ensuring the safety of navigation. Full documentation of the project as well as research results and reports are available at the National Center for Research and Development.
Optimization of the shape and the related reduced energy demand of the unit fits very well into the necessary ecological activities. The main economic assumptions related to the specific fuel consumption in relation to the transported load and the possibility of entering inland ports with a limited permissible height have been met. We are convinced that the implementation of IT and ICT technologies will additionally improve the ship's safety and navigation capabilities. In connection with the current economic trend and independent research on the autonomy of vessels, we hope that the presented research will be continued in the field of semi-autonomy of the vessel, its impact on maritime transport and ensuring the safety of navigation. Full documentation of the project as well as research results and reports are available at the National Center for Research and Development.
Our projects